ACE Component Specifications
ACE interfaces
Overview
ACE requires an embedded computer connected to a small camera. A passive fiducial target is used on the ground to designate the landing site. For GPS-enabled operations, ACE includes a ground-based GPS which connects to the Ground Control System (GCS) for relaying the position of the landing target to the aircraft while the aircraft is out of visual line-of-sight of the fiducial target. Planck provides all required hardware components for a standard implementation.
In the standard implementation, ACE runs on a standalone processor to ensure reliable, secure operation.
Complete details for the system components is provided to customers in an interface control document (ICD).
Details of the hardware components are included in this page. Non-standard or customized implementations may be supported. For example, contact Planck directly for options to deploy ACE on existing UAV computers or cameras.
Power
The embedded computer requires power provided by the drone. The supply voltage is regulated onboard. A cable is provided with the ACE module.
The ACE camera is powered directly from the computer, and no additional power connection is required.
Data
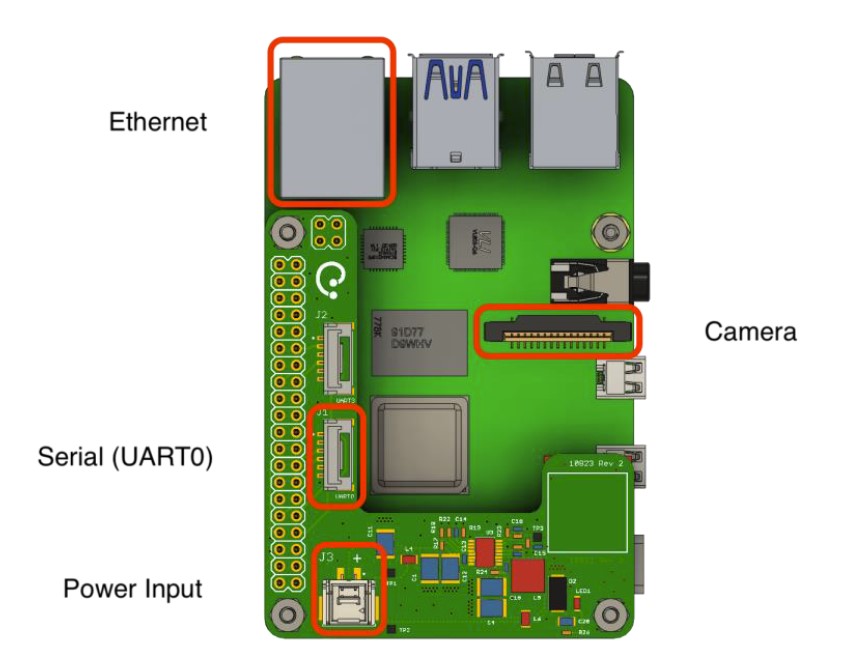
The embedded computer has a bi-directional data interfaces with the autopilot via a serial connection in the standard configuration. For alternative interfaces, such as Ethernet, contact Planck. ACE is compatible with many autopilots and ground control stations. Alternative data interfaces and messaging formats can be supported through Planck's customization options.
The ACE camera interfaces directly with the computer, and no additional data interfaces are necessary.
Mechanical
The ACE module includes an embedded computer, small camera, and associated cabling. The computer, camera, and autopilot should all be mounted so that that cables lengths are minimized and free of electrical or mechanical interference.
Camera
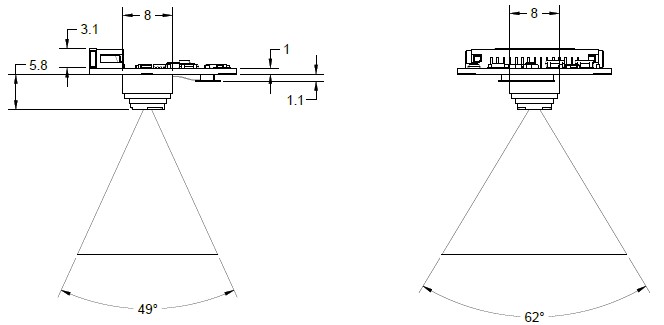
The ACE camera must be mounted in a downward-facing vertical configuration that is free from obstructions. It should be rigidly mounted with the same rigid body that the autopilot is mounted within. For example, the camera may be mounted on the drone arm or fuselage, but should not be mounted on retractable landing gear.
Software / Messaging
ACE commands the aircraft using flight modes that require sending special MAVLink messages back and forth to the UAV autopilot. Planck provides custom open-source ArduPilot firmware for to support the custom messages and ACE flight modes. All existing open-source flight modes continue to be supported, and the custom version is only to support ACE-specific modes and messaging.
Landing Target
ACE uses a proprietary visual fiducial target system to assist with precision landing, takeoff, and station-keeping. Planck provides a landing target on a lightweight, folding material for easy stowage and transportation.
The information below is for the landing target provided by Planck. Customers may wish to use a smaller or larger landing target, or alternative materials, based on their specific application and aircraft size.
For night operation, the landing target must be illuminated with visible or near-infrared light.
Last updated